Grant-in-Aid for Transformative Research Areas (A)
Publicly Offered Research:2022FY
Soft-robotics culture medium
- Principal
investigator - Tsumori FujioFaculty of Engineering, Kyushu University
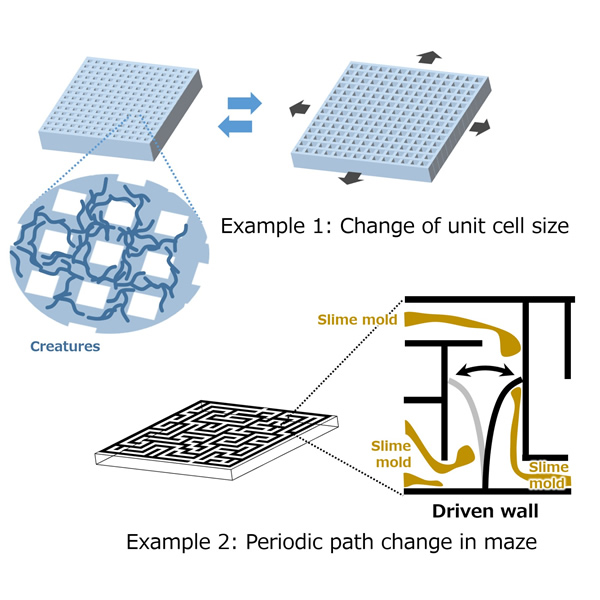
Recently, culture media are widely used for researches on culturing living cells or organisms. This research aims to develop a new culturing system that allows the medium to deform in order to understand behavior of living samples in various environments. We aim to distribute stress according to the design to various locations inside the medium in response to direct deformation from the outside by applying 3D printing technology and 3D patterning of the medium. We also try to develop a culture environment in which the culture medium is driven such as a soft robot, made of a culture medium dispersed with magnetic particles. This research aims to develop a "culture medium that could deform", or in other words, a "soft-robotic culture medium". We believe that the development of this soft-robotic culture medium will enable us to realize a variety of responses and expanding the variations of diorama environments.