Grant-in-Aid for Transformative Research Areas (A)
Publicly Offered Research:2024FY
Control of local diorama environment using microwall plates and analysis of collective motion of microbe
- Principal
investigator - Masaru KojimaGraduate School of Engineering Science, Osaka University
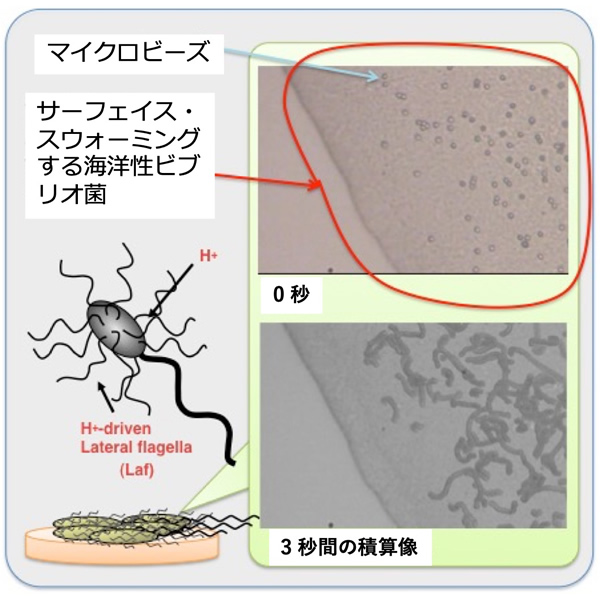
In this proposal, we will integrate microfabrication and micromanipulation technologies, establish a methodology for controlling the direction of microbial movement by using these technologies, and furthermore, work on the evaluation of this methodology. First, we will establish a method to easily set up microfluidic structures at arbitrary locations by integrating the technologies. Specifically, the fabricated microstructures will be placed at targeted locations by micromanipulation, and a micro diorama environment will be designed at arbitrary locations. At the same time, an automated analysis system will be constructed to promote the development of a system that contributes to the analysis of various microbial movements. The developed system will be used for the analysis of "surface swarming" a special form of collective movement of Vibrio alginolyticus. We will work on modeling this collective movement, which is not swimming in liquid, but crawling on the surface of organisms and solids, and demonstrate the effectiveness of the established system.