Grant-in-Aid for Transformative Research Areas (A)
Publicly Offered Research:2022FY
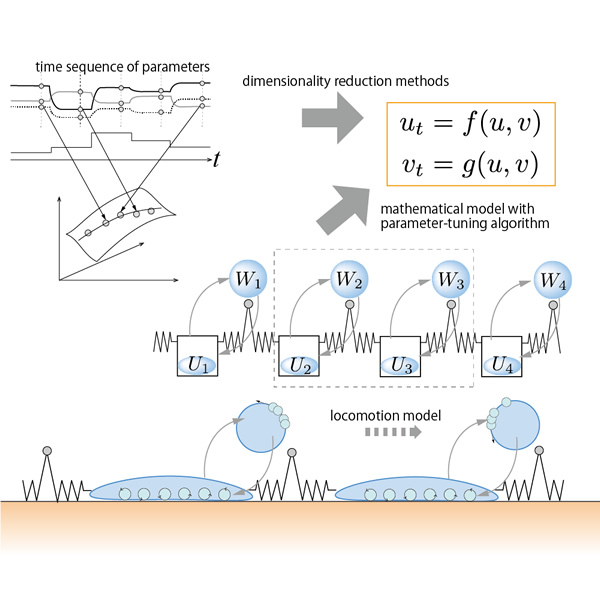
Model generation algorithms for understanding locomotion mechanisms
- Principal
investigator - Keiichi UedaFaculty of Science, Academic Assembly, University of Toyama
Biological systems move in a variety of ways depending on the environment. The purpose of this research is to clarify the mathematical mechanism of flexibility in locomotion. Firstly, in order to reproduce the cell motion, we propose a parameter-tuning algorithm and implement the algorithm to the mathematical model. Secondary, a simple control function is derived by using dimension reduction techniques. In addition, the variety of the motions is represented by attractors in the phase space and the flexible behavior is described by the transition between attractors. Finally, an essential variable governing the motion behavior is found.