ジオラマ行動力学
ジオラマ行動力学
Ethological dynamics in diorama environments
Ethological dynamics in diorama environments
文部科学省科学研究費 助成事業 「学術変革領域研究(A)」 ジオラマ環境で覚醒する原生知能を定式化する細胞行動力学
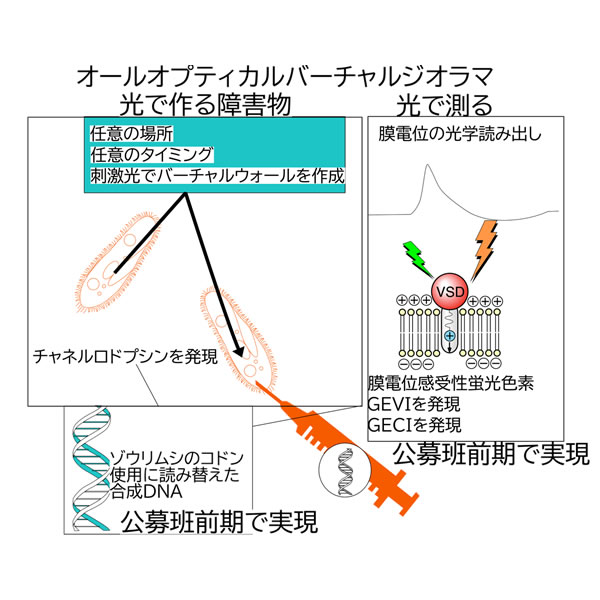
ゾウリムシは100年以上も動物行動のモデル生物として利用されてきた。特に1970年代以降は「泳ぐ神経細胞」「泳ぐ受容体」として、その行動が、膜電位応答、カルシウムを代表とする細胞内信号伝達系の挙動でほぼ解析できる重要な一種の生物機械モデルである。これらの知見は、ゾウリムシの大きさを利用した2本刺しの膜電位固定を含む高精度の電気生理学に裏打ちされたものである。ところが近年、さらに詳細な行動解析から、この知見を超える知能ともいえる行動制御の仕組みを持っていることが明らかになりつつある。これを探るには自由自在に操れるバーチャルジオラマ環境が必要である。申請者は膜電位イメージングという手法を用いて海馬を中心とした脳の高次機能を研究している。この手法をゾウリムシに適用し、ゾウリムシの膜電位の光読出しが行えることを前期の公募班で実証した。本研究では、オプトジェネティクスの手法を導入することで、光を操作して仮想的な障害物を任意のタイミングで制御可能なバーチャルジオラマを作り、ゾウリムシの膜電位光計測と光刺激による仮想障害物を組み合わせたオールオプティカル・バーチャルジオラマを創出する。これによりゾウリムシが従来の生物機械的な理解を超える知能(原生知能)を持つこと、またその仕組を明らかにする。