 ジオラマ行動力学
ジオラマ行動力学
Ethological dynamics in diorama environments
Ethological dynamics in diorama environments
文部科学省科学研究費 助成事業 「学術変革領域研究(A)」 ジオラマ環境で覚醒する原生知能を定式化する細胞行動力学
アルゴリズム評価班(B02)は、粘菌が迷路の最短経路を探索するアルゴリズムなどを解明している中垣と、微細藻類の集団運動モデルを構築している飯間で構成されています。公募研究を含めた他班のアルゴリズムの検証を行い、各研究課題にフィードバックします。
微生物の行動および環境とのクロストークアルゴリズムの解明
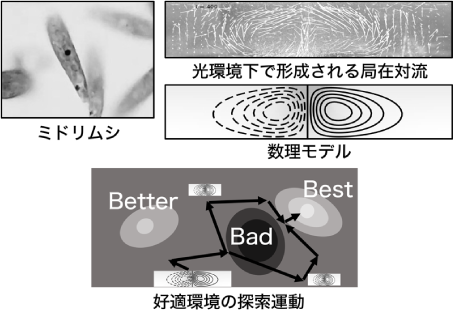
原生知能を定式化するためには、原生生物の個体及び集団が様々なジオラマ環境において覚醒する「能力」を数理科学の言葉で記述する必要があります。そのためには実験データや数値シミュレーションにより得られた情報から本質を抽出する作業が必要となります。本課題では様々な環境下におかれた微細藻類が好適環境を探索する運動を調べます。データ解析やモデル実験系を専門とする研究分担者や研究協力者と協力し、ジオラマ環境下での適応的運動をモデル化します。そうして、そのモデルの数理解析や実験による検証を通して原生知能の定式化を行います。更に他の班と連携し、得られた結果を精子や海生藻類の運動と比較することで、生殖や環境赤潮での問題解決につなげることを目指します。

広島大学大学院統合生命科学研究科
教授 飯間 信
1998年京都大学大学院理学研究科終了(博士(理学))
北海道大学電子科学研究所助手、助教、広島大学大学院理学研究科准教授、広島大学大学院統合生命科学研究科准教授を経て現職
専門は生物流体力学、非線形解析学


